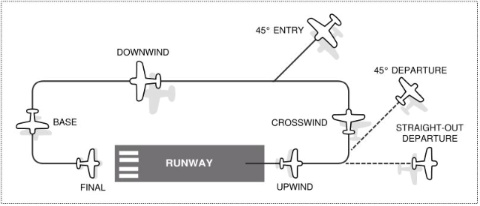
◆ 장주비행(Circuit Pattern 혹은 Traffic Pattern) : 공항주의를 빙 도는 것
① Upwind : 이륙 직후 향하는 방향.
② Crosswind : 활주로에서 일정거리를 지나게 되면 다운윈드로 접근하기 위해 활주로 방향에서 정확히 90도로 돌림. 관제탑에서 이륙할 때 Make Left traffic의 경우 왼쪽으로 턴, Make Right traffic경우 오른쪽으로 턴.
③ Downwind : 활주로 방향과 180도, 최종접근을 시도하기 위해 활주로와 평행으로 헤딩 유지
④ Base : 활주로로 들어서기 위해 Downwind 패턴을 벗어나 Final 패턴으로 들어가기 전 단계
⑤ Final Approach : 활주로로 들어서기 위한 최종 접근.
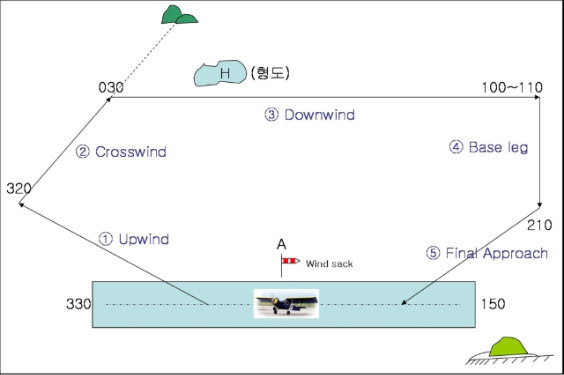
어섬비행장에서는 4가지 방향이 완전 90도씩은 아니고 살짝.. 틀립니다.
이미지 트레이닝도 할 겸 ppt로 낑낑대고 함 그려봤습니다.
<어섬 비행장에서의 패턴 비행>
1. Upwind
ㅇ 이륙 : 윈드색으로 바람방향 확인 -> 택싱하여 활주로 이동 -> 활주로에서 센터 맞추고
-> 심호흡 한번 하고.. 쓰로틀 밀어서 Full Power -> 50마일 되면 조종간 살짝 들어 이륙.
ㅇ Heading : 320 유지
ㅇ RPM : 5000 -> 4800 -> 500피트에서 4500 (이쯤되면 Crosswind 할 준비)
ㅇ 320 Heading으로 가다 보면 저 멀리로는 바다 위에 철탑 사이가 포인트.
한 500피트쯤 올라가면 아래로 황토색 길이 길게 하나 보이는데, GPS도 살짝 보면서 Crosswind 할 준비
2. Crosswind
ㅇ 'Left clear, Forward clear, right clear! Turning crosswind! 외치면서 뱅크 20도 유지 우회전
ㅇ 저 멀리 바다위에 작은 섬이 보이는데 그게 지형지물 포인트.
ㅇ 포인트가 시야에 보일때 쯤이면 고도는 한 700피트.
ㅇ Heading : 030 유지하면서 수평유지
ㅇ 순항고도 : 700피트 / 순항속도 : 70마일 유지 (RPM은 그날의 상황에 따라 4200~4500 조절)
ㅇ 수평유지하고 가다보면 또 아래로 길이 보인다. GPS 궤적한번 확인하고 Downwind 준비
3. Downwind
ㅇ 'Left clear, Forward clear, right clear! Turning Dwonwind! 외치면서 뱅크 20도 유지 우회전
ㅇ Heading : 100~110 사이, 지형지물 포인트는 멀리 보이는 산과 산 사이.
ㅇ 수평유지하고 가다보면 왼쪽으로 형도가 보인다. 형도를 지나면서 "Position Hotel!" 이라고 외침.
ㅇ 아래로 또 길이 보이게 된다. GPS 궤적 확인하고 Base 준비.
4. Baseleg
ㅇ 'Left clear, Forward clear, right clear! Turning Base!' 외치면서 뱅크 20도 유지 우회전.
ㅇ Heading : 210 유지. 저 멀리로는 물길 들어가는 곳이 지형지물 포인트
ㅇ 오른쪽으로 활주로가 슬슬 보이기 시작, 어깨 위치와 45도 정도 되면 Approach 준비
5. Final Approach
ㅇ 'Left clear, Forward clear, right clear! Siera 2052 Final Apporoach' 외치면서 우회전
ㅇ RPM : 3000 , 속도 60마일 유지 (사실 정석이 없다. 그때 그때 달르다고.. ㅜ.ㅜ)
ㅇ 왼쪽에 초록색 동산같은게 보이면 200피트여야 제대로 한거다. 60마일, RPM 3000 유지
ㅇ 착륙 : .. 이건 아직 잘 모르겠습니다. 제대로 배우면 다시 update하겠습니다.
1. Upwind
ㅇ 이륙 : 윈드색으로 바람방향 확인 -> 택싱하여 활주로 이동 -> 활주로에서 센터 맞추고
-> 심호흡 한번 하고.. 쓰로틀 밀어서 Full Power -> 50마일 되면 조종간 살짝 들어 이륙.
ㅇ Heading : 320 유지
ㅇ RPM : 5000 -> 4800 -> 500피트에서 4500 (이쯤되면 Crosswind 할 준비)
ㅇ 320 Heading으로 가다 보면 저 멀리로는 바다 위에 철탑 사이가 포인트.
한 500피트쯤 올라가면 아래로 황토색 길이 길게 하나 보이는데, GPS도 살짝 보면서 Crosswind 할 준비
2. Crosswind
ㅇ 'Left clear, Forward clear, right clear! Turning crosswind! 외치면서 뱅크 20도 유지 우회전
ㅇ 저 멀리 바다위에 작은 섬이 보이는데 그게 지형지물 포인트.
ㅇ 포인트가 시야에 보일때 쯤이면 고도는 한 700피트.
ㅇ Heading : 030 유지하면서 수평유지
ㅇ 순항고도 : 700피트 / 순항속도 : 70마일 유지 (RPM은 그날의 상황에 따라 4200~4500 조절)
ㅇ 수평유지하고 가다보면 또 아래로 길이 보인다. GPS 궤적한번 확인하고 Downwind 준비
3. Downwind
ㅇ 'Left clear, Forward clear, right clear! Turning Dwonwind! 외치면서 뱅크 20도 유지 우회전
ㅇ Heading : 100~110 사이, 지형지물 포인트는 멀리 보이는 산과 산 사이.
ㅇ 수평유지하고 가다보면 왼쪽으로 형도가 보인다. 형도를 지나면서 "Position Hotel!" 이라고 외침.
ㅇ 아래로 또 길이 보이게 된다. GPS 궤적 확인하고 Base 준비.
4. Baseleg
ㅇ 'Left clear, Forward clear, right clear! Turning Base!' 외치면서 뱅크 20도 유지 우회전.
ㅇ Heading : 210 유지. 저 멀리로는 물길 들어가는 곳이 지형지물 포인트
ㅇ 오른쪽으로 활주로가 슬슬 보이기 시작, 어깨 위치와 45도 정도 되면 Approach 준비
5. Final Approach
ㅇ 'Left clear, Forward clear, right clear! Siera 2052 Final Apporoach' 외치면서 우회전
ㅇ RPM : 3000 , 속도 60마일 유지 (사실 정석이 없다. 그때 그때 달르다고.. ㅜ.ㅜ)
ㅇ 왼쪽에 초록색 동산같은게 보이면 200피트여야 제대로 한거다. 60마일, RPM 3000 유지
ㅇ 착륙 : .. 이건 아직 잘 모르겠습니다. 제대로 배우면 다시 update하겠습니다.
'배움의 즐거움 > 하늘날기-초경량 비행일지' 카테고리의 다른 글
| 2008. 05. 11. 초경량 비행일지 (잠시 안녕) (10) | 2008.06.29 |
|---|---|
| 2008. 05. 04 초경량 비행일지 (장주패턴, 이착륙계속) (0) | 2008.06.29 |
| [스크랩] 만화로 배우는 비행원리 (0) | 2008.04.30 |
| 2008. 04. 27 초경량비행일지 (장주비행 / 본격적인 이착륙) (2) | 2008.04.28 |
| 초경량비행기 STOL기 : CH-701 계기판 명칭 (5) | 2008.04.26 |
| 2008. 04. 20. 초경량비행일지 (장주비행 시작) (4) | 2008.04.22 |
| 2008. 04. 19. 초경량비행일지 (1차 업그레이드) (2) | 2008.04.20 |
| 2008. 04. 13. 초경량비행일지 (1) | 2008.04.20 |
| 2008. 04. 12. 초경량비행일지 (첫 야간비행 경험) (6) | 2008.04.18 |
| 2008. 04. 05. 초경량비행일지 (체험비행으로의 회귀) (5) | 2008.04.17 |



